


Gravitational lensing relies upon the propensity of light to follow null geodesics in curved spacetime. This means that if we try to fit the round peg that is the curved space around a mass M into the square hole that is the pre-relativity framework of Euclid, Newton, and Kant, then light rays will appear to be deflected through an angle

| (2.1) |
where b is the impact parameter. Now, an elementary calculation of this deflection angle, analogous to the calculation of the deflection of an ultrarelativistic electron passing by an atomic nucleus, gives precisely half this deflection. When one analyzes the general relativistic calculation, one finds that the other half of the deflection is directly attributable to the space curvature and that this is a peculiar prediction of general relativity. This prediction has been verified with a relative accuracy of ~ 0.001 in a measurement of the solar deflection (Lebach et al. 1995) and we can take this part of the theory for granted.
It turns out to be quite useful (and rigorously defensible), to use the Newtonian framework to think in terms of this "deflection" and to treat space as flat but endowed with an artificial refractive index

| (2.2) |
where  (
( ) is the conventional Newtonian gravitational potential which
-> 0 as r ->
) is the conventional Newtonian gravitational potential which
-> 0 as r ->  (Eddington 1919).
(As < 0, the refractive index
exceeds unity and rays are deflected
toward potential wells.) This also implies that when photons travel
along a ray, they will
appear to travel slower than in vacuo and will take an extra time
(Eddington 1919).
(As < 0, the refractive index
exceeds unity and rays are deflected
toward potential wells.) This also implies that when photons travel
along a ray, they will
appear to travel slower than in vacuo and will take an extra time
 tgrav to pass by a
massive object, where
tgrav to pass by a
massive object, where

| (2.3) |
and where the integral is performed along the ray. (This effect is also known as the "Shapiro delay" and it has been measured with a fractional accuracy ~ 0.002 in the solar system by Reasenberg et al. 1979). If the deflector is at a cosmological distance (at a redshift zd), the gravitational delay measured by the observer will be (1 + zd) times longer, where the expansion factor takes into account the lengthening of time interval proportional to the lengthening of wave periods.
There is a second, geometrical contribution to the total time delay. In
order to compute
this contribution, it is necessary to take account of the fact that the
global geometry of
the universe is not necessarily flat. Fortunately, this can be done by
defining an angular diameter distance (e.g.
Weinberg 1972),
which is the ratio of the proper size of a small
source at the time of emission to the angle that it subtends at a
distant observer. (In
computing the angular diameter distance, it is necessary to allow for
the fact that the
universe expands as the light propagates from the source to the
observer.) Now define
angular diameter distances from the observer to the deflector and the
source by Dd, Ds
respectively and from the deflector to the source by
Dds. If we compare the true deflected
ray with the unperturbed ray in the absence of the deflector, then
elementary geometry
tells us that the separation of the two rays at the deflector is given
by  =
DdDds
=
DdDds  / Ds
(Fig. 1). Now imagine two waves, one emanating
from the source at the time of emission,
the other emanating from the observer backward in time leaving now and
let these two
waves meet tangentially at the deflector along the undeflected ray. The
extra geometrical
path is simply the separation of these wavefronts at the deflector along
the deflected ray,
a distance from the
undeflected ray. As the rays are normal to the wavefronts at the
deflector, we see that the geometrical path difference at the deflector
is just .
/ 2.
Again, we must multiply by (1 + zd). The net result is
an expression for the geometrical time delay
/ Ds
(Fig. 1). Now imagine two waves, one emanating
from the source at the time of emission,
the other emanating from the observer backward in time leaving now and
let these two
waves meet tangentially at the deflector along the undeflected ray. The
extra geometrical
path is simply the separation of these wavefronts at the deflector along
the deflected ray,
a distance from the
undeflected ray. As the rays are normal to the wavefronts at the
deflector, we see that the geometrical path difference at the deflector
is just .
/ 2.
Again, we must multiply by (1 + zd). The net result is
an expression for the geometrical time delay

| (2.4) |
The total time delay is the sum of the gravitational and the geometrical contributions.
Both the gravitational and the geometrical time delays are of comparable
magnitude
~  2 /
H0 for cosmologically distant sources. For typical
deflections ~ 1", this would lead to an estimate
t ~ 1 yr. Curiously, for
many of the sources in which we are
most interested, it turns out that the actual delays are much smaller
than this estimate
(by up to three orders of magnitude). This is because the gravitational
and geometrical
time delays tend to cancel each other out and because we tend to select
observationally
highly magnified examples of gravitational lensing in which the image
arrangement is quite symmetrical.
2 /
H0 for cosmologically distant sources. For typical
deflections ~ 1", this would lead to an estimate
t ~ 1 yr. Curiously, for
many of the sources in which we are
most interested, it turns out that the actual delays are much smaller
than this estimate
(by up to three orders of magnitude). This is because the gravitational
and geometrical
time delays tend to cancel each other out and because we tend to select
observationally
highly magnified examples of gravitational lensing in which the image
arrangement is quite symmetrical.
|
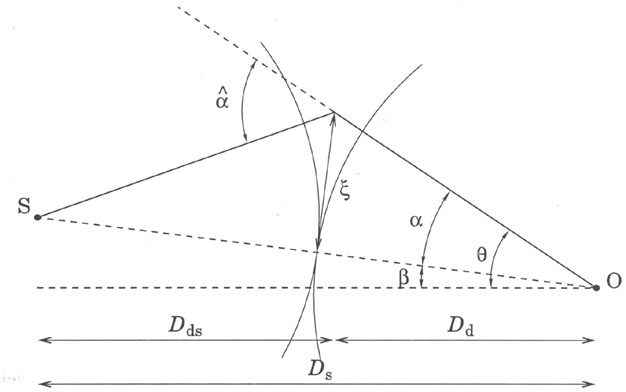
Figure 1. Illustration of the geometrical
time delay in a simplified lensing geometry. The two
wavefronts shown in the figure represent one wave emanating from the
source and the other
wave emanating from the observer backward in time. They meet
tangentially at the deflector
along the undeflected ray. The separation between these two
wavefronts along the deflected ray
is given by the expression
|
In order to evaluate Eqs. 2.3 and 2.4 in a given system, we must construct a model of the deflector. For a general mass distribution, the deflection angle, (which can be regarded as a two dimensional vector as long as it is small), is given by

| (2.5) |
where  is a unit vector
along the ray. We can now use this deflection to solve for the
rays. Let us measure the angular position of the undeflected ray as seen
by the observer relative to an arbitrary origin on the sky, by
is a unit vector
along the ray. We can now use this deflection to solve for the
rays. Let us measure the angular position of the undeflected ray as seen
by the observer relative to an arbitrary origin on the sky, by
 and the
position of the deflected ray by
and the
position of the deflected ray by
 (Fig. 1). These angles must satisfy the general
lens equation
(Fig. 1). These angles must satisfy the general
lens equation

| (2.6) |
where

| (2.7) |
 is the reduced
deflection angle. When Eq. 2.6 has more than one solution, we have a
strong gravitational lens producing multiple images. Common
strong lenses form two or
four images. We can use Eq. 2.6 to write the total time delay in the form
is the reduced
deflection angle. When Eq. 2.6 has more than one solution, we have a
strong gravitational lens producing multiple images. Common
strong lenses form two or
four images. We can use Eq. 2.6 to write the total time delay in the form

| (2.8) |
where

| (2.9) |
and

| (2.10) |
is the scaled surface potential which satisfies the two-dimensional Poisson equation

| (2.11) |
and where

| (2.12) |
is the reduced deflection angle.
 is the surface density in the
lens plane and c =
c2Ds / 4
is the surface density in the
lens plane and c =
c2Ds / 4
 G Dds
Dd is the so-called critical density. The
derivatives are performed with respect to
.
G Dds
Dd is the so-called critical density. The
derivatives are performed with respect to
.
Next, we must calculate the observed magnification. Suppose that we have
a small but
finite source that is resolved by the observer. In the absence of the
deflector, the source
will appear at position
on the sky. After
deflection, the  plane will be mapped onto
the
plane will be mapped onto
the  plane. The Hessian tensor
plane. The Hessian tensor

| (2.13) |
relates the source to the image. (Note that, as the deflection is itself the gradient of a potential, this tensor is symmetric and only has three independent components.) It is usual to relate the image to the source and this requires the magnification tensor which is the inverse of Eq. 2.13:

| (2.14) |
This magnification tensor can be decomposed into an isotropic expansion and a trace-free pure shear. As it is symmetric, there is no rotation.
Now the usual scalar magnification, denoted by µ, is the ratio of the flux observed from an unresolved source seen through the deflector to the flux that would have been measured in the absence of the deflector. As the intensity is unchanged by the deflector, this ratio is simply the ratio of the solid angles subtended by the ratio of the flux with and without lensing, given by the Jacobian

| (2.15) |
These magnifications are not directly observable. Rather, it is the ratio of the magnifications of separate images of the same source that one measures. (Of course this may have to be done at different times of observation if the source varies so as to make the comparison at the same time of emission.) Similarly, if we are able to resolve angular structure in multiple images of a compact source, for example using VLBI, then we can also measure the relative magnification tensor relating two images, A, B

| (2.16) |
This tensor need not be symmetric.
The procedure for estimating the Hubble constant then consists of using
the observed
positions and magnifications of multiple images of the same source to
construct a model
of the imaging geometry which allows us to deduce
for the
sources and
 for all the
images. The total time delay for each image can then be computed in the
model up
to a multiplicative, redshift-dependent factor K given by
Eq. 2.9, which is inversely
proportional to H0. If the time lags between the
variation of two (or more) images can
be measured, it is then possible to get an estimate of H0.
for all the
images. The total time delay for each image can then be computed in the
model up
to a multiplicative, redshift-dependent factor K given by
Eq. 2.9, which is inversely
proportional to H0. If the time lags between the
variation of two (or more) images can
be measured, it is then possible to get an estimate of H0.