A. Errors in several coordinates
The first big problem that you often run into with real data is the fact
that the formulae
I have presented will not work correctly unless the observational errors
occur only in a single
variable, which must be taken as the dependent variable, or the
"y"-direction in most of
the equations that I have written so far. It's true that this condition
is often met, at least
approximately, and we have seen some cases like this. For instance, in
the radioactive-decay
experiment of my first lecture we might guess that the times of the
observations are
accurately known, maybe through some computer-controlled clocking
arrangement on the
Geiger counter. In the least-squares fits of model profiles to star
images which we did in the
second lecture, we may assume that the x, y positions of the individual
pixels are known
with high accuracy, so that the scatter observed in the stellar profile
is dominated by errors
in the actual intensity measurements as opposed to errors caused by our
ignorance of the pixel locations.
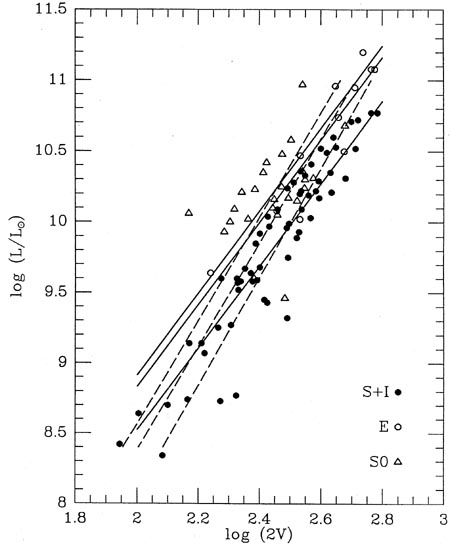
However, in many other cases both coordinates may contain significant
errors. Look
again at Mike Pierce's galaxy data: the three sets of points that I fit
a bundle of parallel
lines to in my first lecture. I really shouldn't have done that, because
I violated my own
conditions laid out at the beginning of the lecture: both coordinates in
that diagram are
observed quantities that are prone to error; it's not safe to assume
that either is known
well enough to put it on the right side of the equals sign. But does it
matter, really? Yes, it does.
To demonstrate this let's do the solution both ways, first putting
luminosity to the left
of the equals sign and then putting velocity to the left, and see if we
get the same straight line
both times. Wanting to use appropriate weights, I asked Mike what he
thought reasonable standard errors for his data were, and he told me:
" [log(L /
L
[log(L /
L )]
)]
 0.04,
[log(2V)]
0.03"
0.04,
[log(2V)]
0.03"
(An eloquent man.) Now let's do the solution both ways, considering only
the standard
error of the independent variable in each case. Here are the actual
results obtained from four-parameter fits, as discussed in
lecture 1:
|
| Attempt Number 1
|
|
| log(L /
L =
m[log(2V) - 2.5] + b(type)
| log(2V) = w[log(L /
L) - 10]
+p(type)
|
| [log(L /
L)] = 0.04
| (2V) = 0.03
|
| m = 2.9113 ± 0.1549
| w = 0.27251 ± 0.01450
|
| b(S + I) = 9.98
| p(S + I) = 2.49
|
| b(E) = 10.29
| p(E) = 2.44
|
| b(S0) = 10.37
| p(S0) = 2.39
|
| m.e.1 = 6.22 | m.e.1 = 2.54
|
|
Please notice that, for the purposes of this example only, the symbol
"w" does not
stand for observational weight, it stands for the inverse of the slope
m. I'm sorry if this
change of notation causes any confusion, but I couldn't resist. I have
subtracted a constant
value from the independent variable in each of these two solutions (I
subtracted 2.5 from
log(2V) on the left, 10 from log(L /
L) on the right)
just so that the zero-point of each
straight line would occur somewhere in the middle of the data -that is
b(type) and p(type)
would represent some "typical" galaxy, not some impossible galaxy with
an internal velocity
of 1 km s-1 or a luminosity of 1
L. However, in
the following discussion, I plan to de-emphasize
the zero-points of these relations as astrophysically "uninteresting,"
and worry about only the slopes, at least for the time being.
If the method of least squares is a magic machine for finding the one
"best" straight
line corresponding to a given set of data, then we must have
w-1 = m, right? Well, is that
what we get? If you whip out your pocket calculator and punch the
numbers in, you'll find
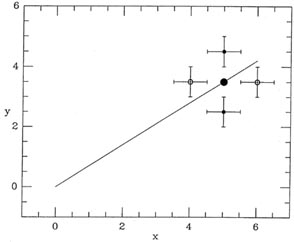
that (0.27251)-1 = 3.6696 not 2.9113. Both these
families of straight lines are illustrated
in Fig. 3-1, where the left-hand solutions
(luminosity as a function of velocity) are shown
as solid lines, and the right-hand solutions (velocity as a function of
luminosity) are shown
as dashed lines. You can even use some of that propagation of errors
stuff to show that
(w-1) =
(w) /
w2 = 0.1953. So not only are the two
slopes significantly different, they are different at something like the
4.5 level, even though both
solutions are based on exactly the
same data! Still believe that least squares is the magic solution to all
your data-reduction problems?

|
| Figure 3-1.
|
You might also have noticed that the m.e.1's of these two solutions are
pretty far from
unity. Maybe that's because in each case we have considered only part of
the observational
errors: in the case of log(L /
L) =
m[log(2V) - 2.5] + b, for instance, a given data point
will lie off the mean straight line not only because of errors in
log(L /
), but also because
of errors in log(2V). If we really want to do the solution right, we
must include both these
standard errors in evaluating the fit. From propagation of errors we can
easily demonstrate that if

then

m -
before we can do the
solution. But you can guess how we'll handle that: successive
approximation! We take
a wild guess at the slope (the value we got from Attempt Number 1,
maybe?), compute
new weights for all the points, redo the solution, use the new m to
reweight all the points,
and do it again and again until the answer stops changing. Surely that
will solve all our problems! So here we go:
|
| Attempt Number 2
|
|
| log(L /
L =
m[log(2V) - 2.5] + b(type)
| log(2V) = w[log(L /
L) - 10]
+ p(type)
|
2
[ ] =
w2(0.04)2 + (0.03)2 ] =
w2(0.04)2 + (0.03)2
| [] =
w2(0.04)2 + (0.03)2
|
| m = 2.9113 ± 0.1549
| w = 0.27251 ± 0.01450
|
| B(S + I) = 9.98
| p(S + I) = 2.49
|
| b(E) = 10.29
| p(E) = 2.44
|
| B(S0) = 10.37
| p(S0) = 2.39
|
| m.e.1 = 2.59 | m.e.1 = 2.38
|
|
The mean errors have changed, but the answers haven't! What has gone
wrong? Well,
think about it. In changing the standard errors of the points in the
luminosity fit from
0.04 to sqrt[m2(0.03)2 +
(0.04)2], we have
changed the weight of each point from 1/(0.04)2 to
1/[m2 (0.03)2 +(0.04)2]. The weights
may have changed, but the weight of every point is still
the same as the weight of every other point, regardless of what m
is. This is the equivalent
of simply adopting a different scaling parameter s in the definition of
those weights. As
we saw before, changing s doesn't affect the least-squares solution at
all, because it can be
pulled out of the summations and it always cancels out. So we get the
same answer, and
have exactly the same problem of unequal straight lines as we had before.
We must try to figure out why this problem occurs before we can work out
a solution
to it. Let's back up a step and take another look at our original
equations of condition:
(Note that wi has now gone back to its original meaning of
weight.) At the same time, take
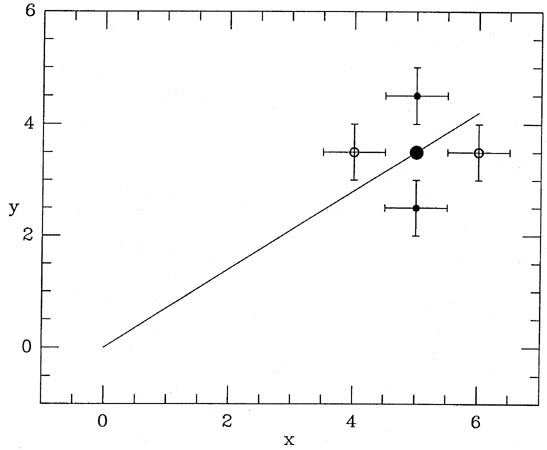
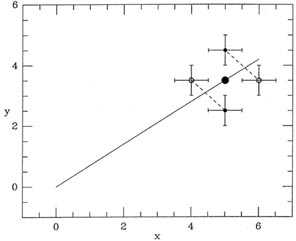
a look at Fig. 3-2 and consider some data
point lying toward one end of
the distribution.
The large dot lying on the line represents the "true" position of that
data point, as it would
be seen if it could be observed with absolutely no errors. Now, a random
observational
error in the y-coordinate can move the observed position
of this point either up or down
(closed dots with error bars); the probability of these two
observational errors will be equal,
provided that the error distribution is symmetric. (Please note that for
this argument to
be valid, there is no need to assume that the error distribution is
Gaussian, merely that
it is symmetric.) One of these observing errors will contribute a
positive i to the two
summations above, and the other will contribute a negative
i. As I said,
the probability
of each of these two observations is equal as long as the error
distribution is symmetric;
given enough independent observations, these random errors will tend to
cancel, and in the
long run least squares will give the right answer on average, provided
that the observational errors occur only in the vertical direction.
However, if errors can also occur in the horizontal direction, the
observed position of
the point could also be shifted to the left or right of its true
position (open circles with
error bars), as well as above or below the true position. Again, one of
these points will contribute a positive
i to the
summations and the other will contribute a negative
i,
and again the probabilities will be equal for equal
|i|, provided the
error distribution is
symmetric. However, in this case the errors do not cancel. In the first
of the two condition
equations above, because the ei, are multiplied by the
observed x's of the points, one of the
two 's - the one belonging
to the point which has been scattered to the right - will make
a larger contribution to the first summation than the
belonging to the
point which has
been scattered to the left. The point at the right will exercise more
leverage on the line
than the point at the left, and will tend to pull the end of the line
down, making its slope
too shallow. If you turn Fig. 3-2 over, and
consider the case of a point whose true position
is near the left end of the relationship, you'll find a mirror-image
situation which leads to
the same result: the vertical errors cancel, but that observation whose
horizontal error has
scattered it away from the centroid of the observed data points will
exert more leverage on
the slope than the one whose error has scattered it toward the centroid
of the data. Again,
this excess leverage will tend to make the slope too shallow. This is
the general rule: When
observational errors occur in the horizontal direction, there is a
strong, systematic tendency
to underestimate the slope of the mean relationship. This is because we
use the observed x
coordinate of the point to evaluate the summations. We do this because
it is what all the recipes in the standard cookbooks on "Statistics for
Scientists" tell us to do (and this is
what the referee of our paper expects us to do), and we forgot to
remember that this only
works if the errors are confined strictly to the vertical dimension.
|
| Figure 3-2.
|
To handle this situation correctly, we must go back even farther: to the
Principle of
Maximum Likelihood itself. We must evaluate the summations using not the
observed x-coordinate
of each point, but rather the most likely x-coordinate. After all, the
Principle
of Maximum Likelihood is expressed by the statement, "That version of
the Truth is most
likely which, under the assumption that that Truth is True, maximizes
the probability of
my seeing what I have seen." The statement that "The
(maximum-likelihood) True x, y
position of this particular point is the one which maximizes the
probability of its observed
x, y" is one small component of that Truth which must be
assumed to be True if the Principle
of Maximum Likelihood is to be applied correctly. What this means is
that the derivatives
ð 2 / ðm
and ð2 /
ðb must be evaluated not at the data points' observed
positions, but at
their most probable true positions. The correct condition
equations are not
2 / ðm
and ð2 /
ðb must be evaluated not at the data points' observed
positions, but at
their most probable true positions. The correct condition
equations are not
but rather
where  is the maximum-likelihood
estimate of the "true" x-coordinate of the point.
is the maximum-likelihood
estimate of the "true" x-coordinate of the point.
But we don't know what the
i are, all we know is the
xi. So how on Earth can we
solve our problem? Well, again I'm afraid that we'll have to iterate a
little. We must start
off with some crude estimate of the best-fitting straight line - maybe
the one obtained by
pretending that ordinary least squares is OK. Then we go through the
rigmarole illustrated
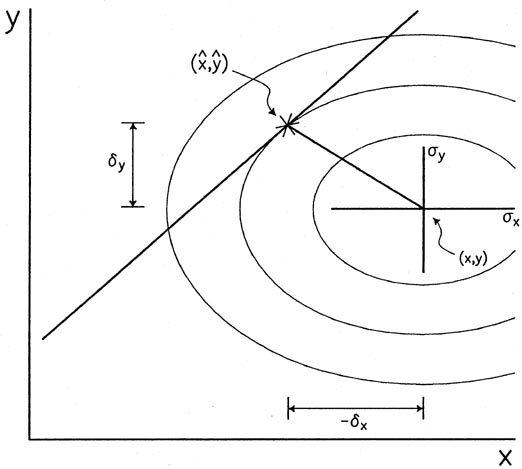
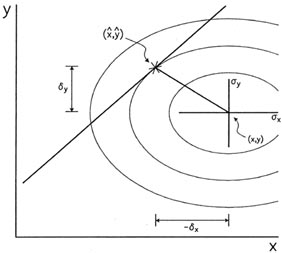
in Fig. 3-3. Imagine that our data point sits
under a bell-shaped surface representing the
probability of all possible combinations of errors,
x and
y; the
equal-probability contours
of that surface are ellipses, three of which are shown
(3). The straight
line in the figure
represents our current estimate of the linear relationship between the
"true" values of x
and y. The most likely position of the "true" value of this data point
on the current assumed
relationship is that point where the straight line penetrates most
deeply into the nest of
error ellipses surrounding the point's observed position: it is the
place - marked with a
star - where the current estimate of the best straight line touches the
innermost error ellipse that it ever gets to.
|
| Figure 3-3.
|
As an alternative - mathematically more correct - visualization, you might like
to take a more literal interpretation of the Principle of Maximum
Likelihood: the best
estimate of the "true" position of the data point is that position on
the line such that, when
that "true" position is assumed to be correct, the probability of the
observed position is
maximized. To illustrate this version of the statement, imagine taking
the nest of error
ellipses away from the data point. Now imagine sliding the whole set of
error ellipses up
and down along the current guess at the best straight line, keeping the
center of all the
ellipses strictly on the line itself. Where does the center of all these
error ellipses lie, when
the smallest possible ellipse is touching the data point? I think you
can convince yourself
that it is exactly the same starred point
(,
 ) that I've indicated in
Fig. 3-3.
) that I've indicated in
Fig. 3-3.
Now let's figure out where this starred point is, shall we? If you have
a data point with
observed coordinates (x, y) and standard errors
x and
y and if you have a
provisional
best-fitting line with slope m0 and y-intercept
b0, then we have the situation which I've
shown in Fig. 3-3. The equation for the line is

and the equation for any of the ellipses is
where  x =
- x and
y =
- y - the
difference between
the point's observed coordinates
and its most likely "true" coordinates. (This assumes that the errors in
x and y are
independent. It is perfectly straightforward to develop an analogous
solution for correlated
errors, but the extra algebra is a little more than I want to go into
right now.) Of course,
the particular error ellipse that we want is the one with the smallest
possible value of
"constant"; this ellipse will be tangent to the straight line, since if
the line crosses over the
ellipse, it will obviously get the chance to touch still smaller
ellipses. One condition for the
ellipse to be tangent to the straight line
= m0
+ b0 is
x =
- x and
y =
- y - the
difference between
the point's observed coordinates
and its most likely "true" coordinates. (This assumes that the errors in
x and y are
independent. It is perfectly straightforward to develop an analogous
solution for correlated
errors, but the extra algebra is a little more than I want to go into
right now.) Of course,
the particular error ellipse that we want is the one with the smallest
possible value of
"constant"; this ellipse will be tangent to the straight line, since if
the line crosses over the
ellipse, it will obviously get the chance to touch still smaller
ellipses. One condition for the
ellipse to be tangent to the straight line
= m0
+ b0 is

The derivative of the ellipse equation is
so the slope at any point on the ellipse is
which gives us
The other condition for the ellipse to be tangent to the line is

which I'll use in a minute.
Now, we have to take a moment and rethink what we mean by our analytic "model,"
and by the observed data point's residual. If we can really have errors
in more than one of
our observational variables, then all the magic has gone out of the left
side of the equals
sign. If we can put error-prone quantities on the right, then we can put
error-free quantities
on the left! We can even put zero on the left of the equals sign if we
want to, and what
physical constant is known better than zero? By which I mean to say: if
we want to, we can right our fitting equation in the form

What could be fairer than this? The observations x and y - two
error-prone quantities if
ever I saw any - are both together on the same side of the equals sign,
with neither one
receiving any sort of preferred status. Now, if our data point should
really lie at (,
), and
has been observed at (x, y) =
( -
x,
-
y), what is the distance of
the point from the
provisional curve? Well, if our current analytic model is

and our observation is

then to first order the net observational error of the point is given by

Now you think I'm completely out of my mind. Anyone can see that the
residual of the point is the same as it's always been,

right? Wrong! What matters is not how far the observed data point is
from the model curve
in the vertical direction, it is how far the observed point is from the
"true" point - that's
what tells you what the observational errors are, which in turn tell you
the probability of
getting that observation. The distinction becomes more obvious when we
fit more complex
curves than straight lines. Suppose, for instance, we were fitting a
parabola to these data.
The parabola might curve up sharply between
and x, making it appear to
be a BIG
residual, when in fact the point had only been shifted a little to the
side. It's not how far
your data point is below the curve that matters, it's how far it is from
where it belongs. So
henceforth we will need to recognize the distinction between the true
residual, , and the
apparent residual,  y.
y.
Now, it just so happens that in this particularly simple case, where we
are fitting a
straight line to the data, the true and apparent residuals are
equivalent:
However, as I said, this will not be true for any function other than a
straight line. If I now write the second equation for tangency as

you can easily see that
We're almost home now.

Here it comes . . .
At last we can compute from known, assumed, or observable quantities -
the 's and
y -the
most likely "true" position that the data point would have had on our
assumed straight
line, if only the point had no observational errors. We can now compute
= x +
x (and
= y +
y, though we don't
need it). And finally, with our newly improved guess at where
the point should be, as distinguished from where it is, we can use our
good ol' least-squares
techniques to compute corrections to the parameters of the line:

(Oh! those darned minus signs.) Iterate! Use the provisional line to
improve our information
of where the point ought to be! Use the improved x coordinates of the
points to improve the estimate of the line!
|
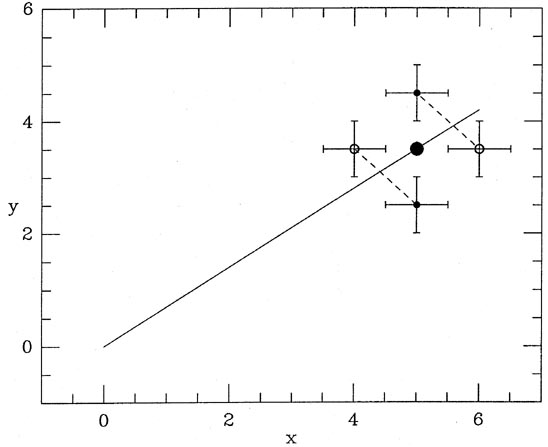
| Figure 3-4.
|
Fig. 3-4 shows how
Fig. 3-2 looks at the end of this mess, with short
dashed line
segments illustrating the data points' final residuals. As long as all
"observed" data points
on a given error ellipse around the true point are equally probable -
and this is true by
definition - then in the long run, with enough data, the errors will
tend to cancel out:
there is no net torque remaining on the model to twist it away from the
right answer. The
only thing that you have to remember in order to create this happy
circumstance is that
the real, genuine maximum-likelihood condition equations are
It doesn't much matter how you approach the ultimate parameter
values. Once these
conditions have been met, you have the "best" parameters for your
straight line.
Let me show you some simulations that I ran to demonstrate this
methodology. I made
up a bunch of synthetic data satisfying the condition

Just for simplicity in understanding what is going on, and with no loss
of generality, I arbitrarily set m
 1 and b
0. I then generated random
observational "errors" in x and y,
1 and b
0. I then generated random
observational "errors" in x and y,
where the size of the standard errors were themselves chosen at random:
just to illustrate that this works for unequal standard errors. I
generated 5,000 sets
of 10 data points having these properties, and fit straight lines to
them using standard
least-squares and considering only the standard errors in the
y-coordinates; then I fitted
straight lines again using standard least squares, but this time
considering the errors in
both coordinates, and iterating to get the slopes and relative x- and
y-error contributions
right; last, I fitted them using the scheme I outlined above, where the
equations are based
not on the points' observed x coordinates, but rather on their projected
most-likely "true"
coordinates .
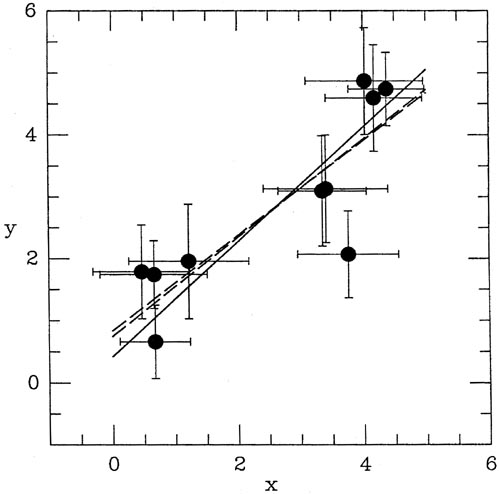
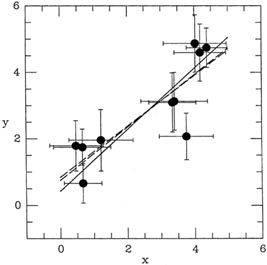
Fig. 3-5 shows the data points and derived
solutions for one typical sample
of ten synthetic observations; the steepest slope, represented by the
solid line, is found with
the true maximum-likelihood technique I have just described.
|
| Figure 3-5.
|
|
| Figure 3-6.
|
|
| Figure 3-7.
|
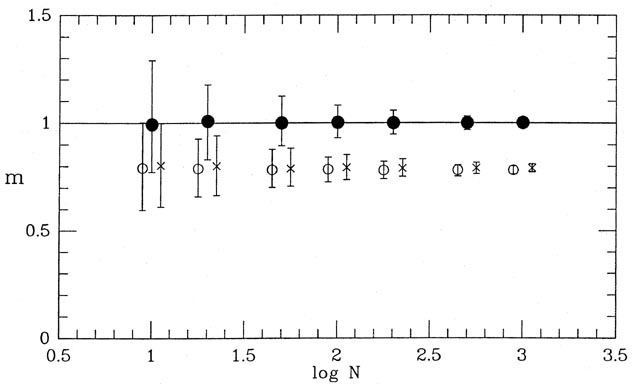
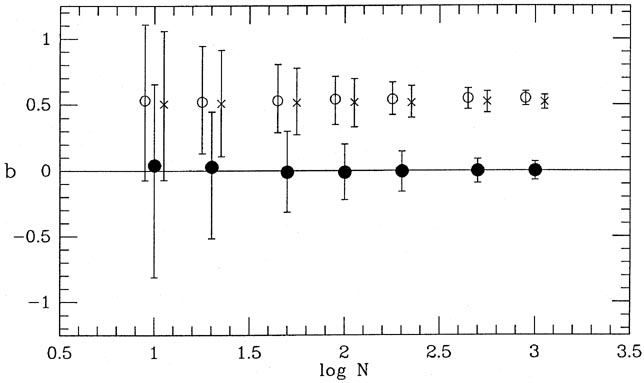
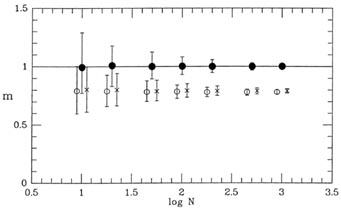
I repeated this experiment, generating 5,000 samples apiece for sample
sizes of 20, 50,
100, 200, 500, and 1,000 data points. The results of this test are shown
in Figs. 3-6 and
3-7, where the range of recovered slopes
 and
zero-points
and
zero-points  are shown
as functions of
sample size. In each case, the open circle shows the median recovered
parameter value for
the first type of solution, considering only the errors in y -
2()
= 2(y); the
x's show
the median parameter values for the second type of solution -
2() =
2(y) +
m22(x);
and the closed circles show the median recovered parameter values for
the least-squares
solutions based upon the maximum-likelihood "true" x-values for the
points. In each case, the error bars represent ±32%
(
±) ranges for the
recovered parameter values. As you
can see, both of the first two types of least-squares solution
systematically underestimate
the true slope of the relation, just as I described above. Furthermore,
this bias does not
go away for larger and larger sample sizes. No matter how many data
points you have,
the bias remains the same: the slope is underestimated by about 20%,
under the present hypothesized conditions
< (x) > 0.75,
xmax,true -
xmin,true < 5. The bias is just about
equal to the standard error of the slope for a single solution based
upon ten data points,
but the systematic error dominates over the random errors for larger
sample sizes. You may
reasonably imagine that the bias would be even greater for larger values of
are shown
as functions of
sample size. In each case, the open circle shows the median recovered
parameter value for
the first type of solution, considering only the errors in y -
2()
= 2(y); the
x's show
the median parameter values for the second type of solution -
2() =
2(y) +
m22(x);
and the closed circles show the median recovered parameter values for
the least-squares
solutions based upon the maximum-likelihood "true" x-values for the
points. In each case, the error bars represent ±32%
(
±) ranges for the
recovered parameter values. As you
can see, both of the first two types of least-squares solution
systematically underestimate
the true slope of the relation, just as I described above. Furthermore,
this bias does not
go away for larger and larger sample sizes. No matter how many data
points you have,
the bias remains the same: the slope is underestimated by about 20%,
under the present hypothesized conditions
< (x) > 0.75,
xmax,true -
xmin,true < 5. The bias is just about
equal to the standard error of the slope for a single solution based
upon ten data points,
but the systematic error dominates over the random errors for larger
sample sizes. You may
reasonably imagine that the bias would be even greater for larger values of

and smaller for smaller values of this ratio. The true
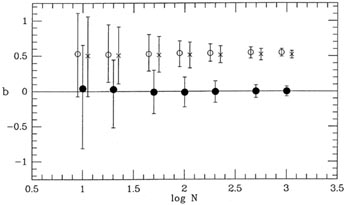
maximum-likelihood technique has no such bias.
Because in this example the data points are concentrated to the right of
the y-axis,
when the cookbook least-squares algorithms underestimate the slope, they
also cause the
fitted line to intersect the y-axis too high (cf.
Fig. 3-5). Again, this
bias does not occur for the true maximum-likelihood technique.
So what does this method give us when presented with Mike Pierce's galaxy data?
|
| Attempt Number 3
|
|
| log(L /
L) =
m[log(2V) - 2.5] + b(type)
| log(2V) = w[log(L /
L) - 10] +
p(type)
|
| 2[] = (0.04)2 +
m2(0.03)2
| 2[] = (0.03)2 +
w2(0.04)2
|
| [log(2V)] =
{-m2[log(2V)]} / {m2
2[log(2V)] +
2[log(L /
L)]}
| [log(L /
L)] =
{-w2[log(L /
L)]} /
{w22[log(L /
L)] +
2[log(2V)]}
|
| m = 3.5585 ± 0.1843
| w = 0.28102 ± 0.01455
|
| b(S + I) = 10.01
| p(S + I) = 2.50
|
| b(E) = 10.21
| p(E) = 2.44
|
| b(S0) = 10.41
| p(S0) = 2.39
|
| m.e.1 = 2.38 | m.e.1 = 2.38
|
|
Whip out your pocket calculators and compute w-1 and
(w) /
w2 and tell me if you don't
think we've done the right thing. Yes, we did!
There is still a problem, however. Did you spot it? The problem isn't
with the analysis,
it's with the data. Do the best we can with the least squares, Mike's
data still come up
with m.e.1 = 2.38 - the scatter is more than twice as large as it should
be. So Mike has
either underestimated the errors of some of his data, or there is some
cosmic scatter in
the relationship between luminosity and internal velocity. If the errors
are underestimated,
which ones are wrong? If you believe the velocities are fine and the
luminosities are poor,
you'll get one value for the true slope, but if you assume the
luminosities are fine and the
velocities are scrod up, you'll get another value for the slope. It's
not simply that what
you believe about the random errors of your data can affect your
confidence in the answer,
but rather your knowledge of the errors can affect the answer itself!
Good values for the
standard errors are nearly as important as good values for the observations.
Suppose that Mike has correctly estimated his standard errors, and that
the problem
is a cosmic dispersion in the luminosity-velocity relationship? Well,
then, which do you
prefer to believe? That there is a range of internal velocities among
galaxies of the same
luminosity? Or that there is a range of luminosities among galaxies of
the same internal
velocity? The way in which you answer these questions will affect the
maximum-likelihood
slope that you derive from the data.
Before I leave the subject, I must stress once again: the correct
formulae for relating
an observed datum to its maximum-likelihood true values are
where, to first-order approximation
(This can easily be - and has been - generalized to problems where any
number of
observable quantities - not just two - can include observational errors:
Jefferys 1980.)
As you can see, in fitting any function other than a straight line, we
are caught in the same
old bind: we can't get the "true" coordinates of the point until we have
the residuals, and
we can't get the residuals until we have the true coordinates. For a
straight line - and for
a straight line only - we can use
=
y (since we can observe
y, given
a first guess at
the model), which results in the machinery I have just described. For
any other function
we must - can you guess? - Iterate! We postulate a model curve of the form,

guesstimate by evaluating
ðF / ðx and ðF / ðy at
the location of the observed
datum, (x0, y0) (I'll
have to change notation for the moment and call the observed data point
(x0, y0). You'll
see why right away.) From this
we can compute provisional
residuals x
and y -> a new,
improved datum, (x1, y1). Now this
revised point will not, in general, be on the model
curve, but it should be closer than (x0,
y0) was. We evaluate ðF / ðx
and ðF / ðy at this point,
compute a new x and
y, and ... We keep
iterating until we finally
arrive at a point (,
)
which does satisfy our current model,
F(,
; m0,
b0) 0. Then
we are ready to perform
one more iteration of the least-squares solution, for the refinement of
the model itself.
This is not "fudging" your data! The correct statement of the maximum
likelihood
condition is, "If my model is the best that money can buy, and if I
assume that each data
point should lie on the model, then the probability of finding them
where they appear to be
is maximized." It's simply a matter of twitching the model, and then
staggering from where
the points appear to be to where they most probably ought to be, so we
can compute the
likelihood of the observations. The residuals are always computed from
where they appear
to be to where they ought to be, and it is only our estimate of where
they "ought" to be
that we are adjusting so as to maximize the likelihood.
Since this method employs the Taylor approximation
it is not exact! However, it is still better than anything else on the
market, and it is good
enough for government work as long as the curvature of the model is
small within the area spanned by the scatter of the data:
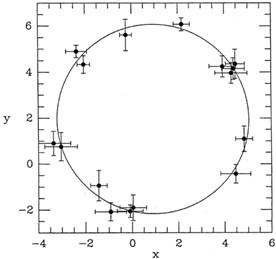
and so on. I have even used this method to fit circles to data with
errors in both coordinates:

where x0, y0, and R were free
fitting parameters
(Fig. 3-8). Now, you can imagine that as
the error bars become big compared to the radius of the circle, random
observational errors
will cause the observed data to fail outside the circle slightly more
often than they fall inside
the circle, so that a first-order least-squares fit to the data will
tend to overestimate the
circle's radius by a tiny amount. A second-order expansion would give an
exact fit, but first
order is good enough provided the errors are small compared to the
circle (as illustrated).
|
| Figure 3-8.
|
This is the place to point out another subtlety and to confess to
another sin. Whenever
your estimate of the error of some observable quantity depends upon the
value of that
quantity, the error must be evaluated on the basis of the estimated
maximum-likelihood
"true" value, not on the basis of the observed value. Do you remember
back in Lecture 1,
in the radioactivity example, where I observed Ni counts in
some interval and said that this
result was uncertain by
± Ni? This
was wrong and I shouldn't have done it. Why? Well,
suppose that the true expected number of radioactive decays in some
interval was 100 counts.
In identical repeated experiments you'll sometimes get more than 100
counts, sometimes
less, just because of Poisson statistics. With essentially equal
probability, you could get
90 counts in that interval, or you could get 110. If you then weight
these observations
according to the observations themselves, you'd say the first
observation was 90 ±90, and
the second was 110 ±110 -
the first observation would get more weight than the second
in spite of the fact that in Truth they are equally likely. In fitting a
large ensemble of data,
you wind up systematically underestimating the truth. For maximum
likelihood to work,
you must assume the truth of the model in evaluating the likelihood of
the observations, and
it is this likelihood which must be maximized. Iterate! Sure, you can
start out by weighting
the data according to their observed values, thus:
Ni? This
was wrong and I shouldn't have done it. Why? Well,
suppose that the true expected number of radioactive decays in some
interval was 100 counts.
In identical repeated experiments you'll sometimes get more than 100
counts, sometimes
less, just because of Poisson statistics. With essentially equal
probability, you could get
90 counts in that interval, or you could get 110. If you then weight
these observations
according to the observations themselves, you'd say the first
observation was 90 ±90, and
the second was 110 ±110 -
the first observation would get more weight than the second
in spite of the fact that in Truth they are equally likely. In fitting a
large ensemble of data,
you wind up systematically underestimating the truth. For maximum
likelihood to work,
you must assume the truth of the model in evaluating the likelihood of
the observations, and
it is this likelihood which must be maximized. Iterate! Sure, you can
start out by weighting
the data according to their observed values, thus:

but then derive your error estimates from the current model, not
from the data:

(Of course, if you are doing anything more complicated than a straight
mean - such as
fitting exponentials - it will take more than one iteration to get it
right.) This works in
general, and I can't repeat it enough: for maximum likelihood to work,
you must assume the
truth of the model, including its implications as they regard "true"
values and the standard
errors of your observed quantities. This gives the likelihood which must
be maximized.
3 In stating that the equal-probability
contours are ellipses, I have assumed that the
error distributions in x and y are the same, to within
scale-length constants which may be
represented by some constants
x and
y. It is not
necessary to assume that these error
distributions are Gaussian in form. Back.