


Simply put, the idea behind reverberation mapping is to learn about the structure and kinematics of the BLR by observing the detailed response of the broad emission lines to changes in the continuum. The basic assumptions needed are few and straightforward, and can largely be justified after the fact:
 LT = r /
c is the most important time scale. The other
potentially important time scales include:
LT = r /
c is the most important time scale. The other
potentially important time scales include:
rec =
(ne
 B)-1,
which is the time for emission-line gas to re-establish
photoionization equilibrium in response to a change in the continuum
brightness. For typical BLR densities, ne
B)-1,
which is the time for emission-line gas to re-establish
photoionization equilibrium in response to a change in the continuum
brightness. For typical BLR densities, ne
 1010 cm-3,
rec
0.1 hr, i.e.,
virtually instantaneous relative to the light-travel timescales of days
to weeks for luminous Seyfert galaxies.
1010 cm-3,
rec
0.1 hr, i.e.,
virtually instantaneous relative to the light-travel timescales of days
to weeks for luminous Seyfert galaxies.
dyn
r /
 V. For
typical luminous Seyferts, this works out to be of order 3 - 5
years. Reverberation experiments must be kept short relative to the
dynamical timescale to avoid smearing the light travel-time effects.
V. For
typical luminous Seyferts, this works out to be of order 3 - 5
years. Reverberation experiments must be kept short relative to the
dynamical timescale to avoid smearing the light travel-time effects.
Given these assumptions, a linearized response model can be written as
 |
(2) |
where
C(t)
is the continuum light curve relative to its mean
value  , i.e.,
C(t) =
C(t) -
, and,
L(V,
t) is the emission-line light curve as a function of
line-of-sight Doppler velocity V relative to its mean value
, i.e.,
C(t) =
C(t) -
, and,
L(V,
t) is the emission-line light curve as a function of
line-of-sight Doppler velocity V relative to its mean value
 (V). The
function
(V). The
function  (V,
) is the "velocity-delay
map," i.e., the BLR
responsivity mapped into line-of-sight velocity/time-delay space. It
is also sometimes referred to as the "transfer function" and eq. (1)
is called the transfer equation. Inspection of this formula shows that
the velocity-delay map is essentially the observed response to a
delta-function continuum outburst. This makes it easy to construct
model velocity-delay maps from first principles.
(V,
) is the "velocity-delay
map," i.e., the BLR
responsivity mapped into line-of-sight velocity/time-delay space. It
is also sometimes referred to as the "transfer function" and eq. (1)
is called the transfer equation. Inspection of this formula shows that
the velocity-delay map is essentially the observed response to a
delta-function continuum outburst. This makes it easy to construct
model velocity-delay maps from first principles.
Consider first what an observer at the central source would see
in response to a
delta-function (instantaneous) outburst. Photons from the outburst
will travel out to some distance r where they will be intercepted
and absorbed by BLR clouds and produce emission-line photons in
response. Some of the emission-line photons will travel back to the
central source, reaching it after a time delay
= 2r / c. Thus a
spherical surface at distance r defines an "isodelay surface" since
all emission-line photons produced on this surface are observed to
have the same time delay relative to the continuum outburst.
For an observer at any
other location, the isodelay surface would be the locus of points for
which the travel from the common initial point (the continuum source) to
the observer is constant. It is obvious that such a
locus is an ellipsoid. When the observer is moved to infinity, the
isodelay surface becomes a paraboloid. We show a typical isodelay
surface for this geometry in the top panel of
Figure 1.
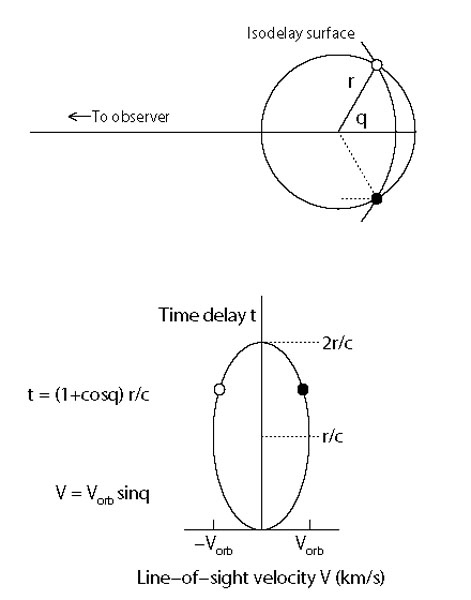 |
Figure 1. Upper diagram: In this
simple, illustrative model,
the line-emitting clouds are taken to be on a circular orbit of
radius r around the central black hole. The observer is to the
left. In response to an instantaneous continuum outburst, the
clouds seen by the distant observer at a time delay
|
We can now construct a simple velocity delay map. Consider the trivial
case of BLR that is comprised of an edge-on (inclination 90°) ring
of clouds in a circular Keplerian orbit, as shown on the top panel of
Figure 1. In the lower panel of
Figure 1, we map the points from polar
coordinates in configuration space to points in velocity-time delay
space. Points (r,
 ) in configuration space
map into line-of-sight velocity/time-delay space (V,
) according
to V = -Vorb
sin,
where Vorb is
the orbital speed, and = (1
+ cos)r / c.
Inspection of Figure 1 shows that a circular
Keplerian orbit
projects to an ellipse in velocity-time delay space. Generalization to
radially extended geometries is simple: a disk is a system of rings of
different radii and a spherical shell is a system of rings of
different inclinations. Figure 2 shows a system
of circular Keplerian orbits, i.e., Vorb(r)
r-1/2, and how these
project into velocity-delay space. A key feature of Keplerian systems
is the "taper" in the velocity-delay map with increasing time delay.
) in configuration space
map into line-of-sight velocity/time-delay space (V,
) according
to V = -Vorb
sin,
where Vorb is
the orbital speed, and = (1
+ cos)r / c.
Inspection of Figure 1 shows that a circular
Keplerian orbit
projects to an ellipse in velocity-time delay space. Generalization to
radially extended geometries is simple: a disk is a system of rings of
different radii and a spherical shell is a system of rings of
different inclinations. Figure 2 shows a system
of circular Keplerian orbits, i.e., Vorb(r)
r-1/2, and how these
project into velocity-delay space. A key feature of Keplerian systems
is the "taper" in the velocity-delay map with increasing time delay.
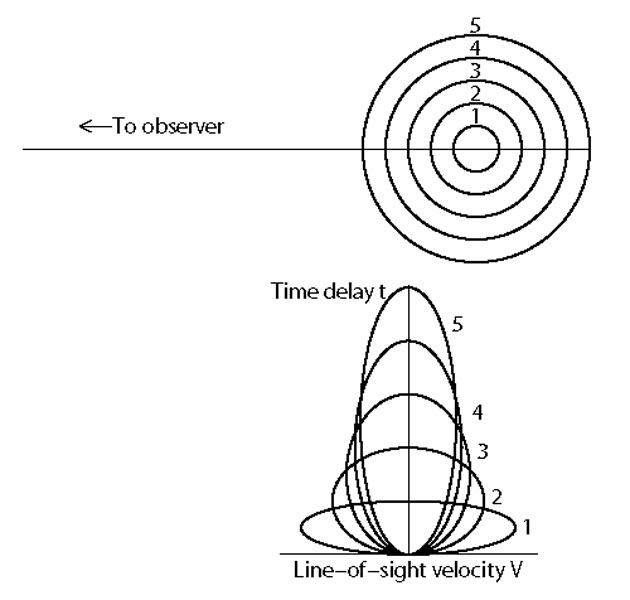 |
Figure 2. This diagram is similar to
Figure 1. Here we show
how circular Keplerian orbits of different radii map into
the velocity-time delay plane. Inner orbits have a larger velocity
range (V |
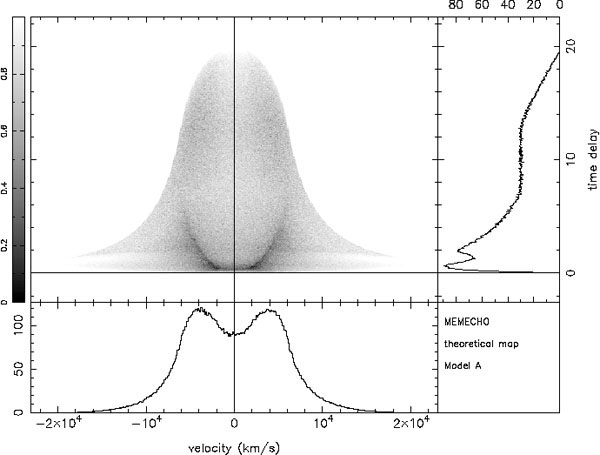
In Figure 3, we show two complete velocity-delay
maps for radially
extended systems, in one case a Keplerian disk and in the other a
spherical system of clouds in circular Keplerian orbits of random
inclination. In both examples, the velocity-delay map is shown in the
upper left panel in greyscale. The lower left panel shows the result
of integrating the velocity-delay map over time delay, thus yielding
the emission-line profile for the system. The upper right panel shows
the result of integrating over velocity, yielding the total time
response of the line; this is referred to as the "delay map" or
the "one-dimensional transfer function." Inspection of
Figure 3 shows that these two velocity-delay
maps are superficially similar; both show clearly the tapering with time
delay that is characteristic of Keplerian systems and have double-peaked
line profiles. However, it is also clear that they can be
easily distinguished from one another. This, of course, is the key:
the goal of reverberation mapping is to use the observables, namely
the continuum light curve C(t) and the emission-line light
curve L(V, t) and invert eq. (2) to recover the
velocity-delay map
(V,
). Equation (2) represents a
fairly common type of problem
that arises in many applications in physics and engineering. Indeed,
the velocity-delay map is the Green's function for the
system. Solution of eq. (2) by Fourier transforms immediately
suggests itself, but real reverberation data are far too sparsely
sampled and usually too noisy to this method to be effective. Other
methods have to be employed, such as reconstruction by the maximum
entropy method
(Horne 1994).
Unfortunately, even the best
reverberation data obtained to date have not been up to the task
of yielding a high-fidelity velocity-delay map. Existing
velocity-delay maps are noisy and ambiguous.
Figure 4
shows the result of an attempt to recover a
velocity-delay map for the C IV - He II spectral region in
NGC 4151
(Ulrich & Horne
1996).
The Keplerian taper of the map is seen, but other possible structure is
only hinted at, as it is in other attempt to recover a velocity-delay
map from real data (e.g.,
Wanders et al. 1995;
Done & Krolik 1996;
Kollatschny 2003).
It must be pointed out, however, that no case to
date has recovery of the velocity-delay map been a design goal for an
experiment. Previous reverberation-mapping experiments have had the
more modest goal of recovering only the mean response time of emission
lines, from which one can still draw considerable information. By
integrating eq. (2) over velocity and then convolving it with the
continuum light curve, we find that under reasonable conditions,
cross-correlation of the continuum and emission-line light curves
yields the mean response time, or "lag," for the emission lines.
 |
 |
Figure 3. Theoretical
velocity-delay maps
|
|
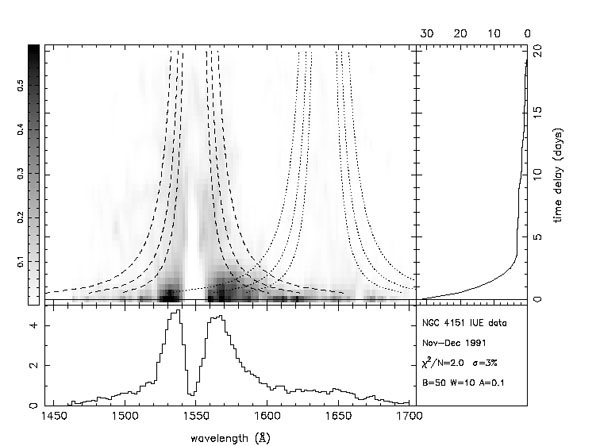 |
Figure 4. A velocity - delay map for the C IV - He II region in NGC 4151, based on data obtained with the International Ultraviolet Explorer. From Ulrich & Horne (1996). |
