


In this penultimate chapter, we bring the results of the previous chapters together with a discussion of analyses involving both the velocity and density fields. This can be done either by predicting the velocity field from redshift surveys using Eq. (150), and comparing with the observed velocities (Section 8.1), or predicting the density field from peculiar velocity surveys using Eq. (149), and comparing with the observed redshift surveys (Section 8.2).
8.1. Comparison via the Velocity Field
Much of the motivation for measuring the velocity field has been to compare it to models of what is expected given the density field. Our historical review of our gradual understanding of the nature of the large-scale flow field focussed on measurements of bulk flows, but in fact much of the motivation of the early work was for measurements of cluster infall. A spherically symmetric cluster embedded in a homogeneous medium induces a spherically symmetric radial velocity field. In linear theory, the cluster infall velocity is simply given by (Eq. 33) :
| (212) |
where r is the distance to the center of the cluster, and
 (r) is the mean
overdensity within r. In fact, for a top-hat
initial density perturbation (i.e., a spherically symmetric
overdensity that is constant in amplitude out to some given radius),
the evolution can be calculated exactly
(Silk 1974
,
1977;
Schechter 1980
;
Bertschinger 1985a
b;
Regös & Geller
1989)
by writing the
evolution of the perturbation and the background density as separate
isotropic expanding or contracting bodies, and matching the boundary
conditions at the edge of the tophat. For the case of an open universe
with an initial mean tophat overdensity
i > 1 at
a time
when the Hubble constant was Hi and the density
parameter was
(r) is the mean
overdensity within r. In fact, for a top-hat
initial density perturbation (i.e., a spherically symmetric
overdensity that is constant in amplitude out to some given radius),
the evolution can be calculated exactly
(Silk 1974
,
1977;
Schechter 1980
;
Bertschinger 1985a
b;
Regös & Geller
1989)
by writing the
evolution of the perturbation and the background density as separate
isotropic expanding or contracting bodies, and matching the boundary
conditions at the edge of the tophat. For the case of an open universe
with an initial mean tophat overdensity
i > 1 at
a time
when the Hubble constant was Hi and the density
parameter was
 i, the radial
velocity field at time t is
i, the radial
velocity field at time t is
| (213) |
where  is defined implicitly
by the equation:
is defined implicitly
by the equation:

| (214) |
Similar equations can be written down for a closed universe. Much of
the early work on interpreting results of velocity fields concentrated
on fitting these formulae to the infall around the Virgo cluster
(Tonry & Davis
1981a
b;
Aaronson et al. 1982b
;
Davis et al. 1982
;
Tully & Shaya 1984
;
Tammann & Sandage
1985
;
Gudehus 1989
;
cf., the review of
Davis & Peebles
1983a).
There has been a
great deal of controversy in the literature about the amplitude of the
cluster infall detected, with characteristic numbers at the Local
Group ranging from 100 km s-1 to 450
km s-1 (Section 7.1);
this, together with the uncertainty in the overdensity of the Virgo cluster itself in galaxies
(Sandage, Tammann,
& Yahil 1979
;
Davis et al. 1982
;
Strauss et al. 1992a),
has meant that values of  determined from Virgocentric infall have been equally uncertain.
Bushouse et al. (1985)
and Villumsen &
Davis (1986)
used
N-body models to test the ability of this method to constrain
0, and concluded
that it works to the extent that one's
peculiar velocity data surrounds 4
determined from Virgocentric infall have been equally uncertain.
Bushouse et al. (1985)
and Villumsen &
Davis (1986)
used
N-body models to test the ability of this method to constrain
0, and concluded
that it works to the extent that one's
peculiar velocity data surrounds 4  steradians of the cluster,
otherwise, shear motions from more distant mass concentrations can
strongly bias the results.
steradians of the cluster,
otherwise, shear motions from more distant mass concentrations can
strongly bias the results.
In the meantime, studies of the Virgo cluster have shown that the approximation of it as an isolated spherically symmetric cluster is less and less applicable. It has been known for years that it shows appreciable substructure on the sky; accurate distances to Virgo galaxies have shown that it probably has appreciable depth (at least in spiral galaxies), which may contribute to some of the controversy as to its distance, and the intrinsic scatter of the Tully-Fisher relation (Pierce & Tully 1988 ; Fukugita, Okamura, & Yasuda 1993). Moreover, the velocity field around it is affected by other, more distant, mass concentrations and voids; in particular, Lilje et al. (1986) demonstrated the presence of a tidal field in the Aaronson et al. (1982a) data from what we now interpret as the Great Attractor.
Spherically symmetric cluster infall models are starting to be
applied to more distant clusters.
Kaiser (1987)
and
Regös & Geller
(1989)
showed that cluster infall causes characteristic caustics in
the redshift-space maps of galaxies around clusters, although the
structure in the galaxy distribution in the field in which the cluster
is embedded can make these caustics difficult to identify. Careful
measurement of these caustics has the potential to yield the linear
cluster infall velocity, which, together with the measured overdensity
of galaxies in the clusters, will yield
. However, it is not
yet clear how practical this approach is given the complicated effects
of intrinsic small-scale structure in the galaxy distribution outside
the clusters themselves.
There have been a variety of attempts to go beyond the single cluster model for the velocity field by invoking two or more clusters (e.g., Faber & Burstein 1988 ; Han & Mould 1990 ; Rowan-Robinson et al. 1990), or even to fit the flow field around a void (Bothun et al. 1992). But given the availability of redshift surveys covering much of the sky, we can trace out the full density field at every point in space (at some modest smoothing length) in the local universe, and compare the resulting predicted velocity field (Section 5.9) with observations.
8.1.2. Unparameterized Velocity Field Models
In this section and the next, we describe the most direct comparisons
between peculiar velocity and redshift surveys. Linear theory gives a
relation between galaxy density and peculiar velocity
(Eq. 33), which can be used to derive a velocity
field from a redshift survey (Section 5.9).
The resulting
velocity field can be compared point-by-point with measured peculiar
velocities in a Method I analysis (usually using the forward DI
relations); the slope of the resulting scatter plot is thus in
principle a measure of . This
process is actually somewhat
subtle: sampling the predicted peculiar velocity field at the measured
distance of each galaxy gives biased results, due to the substantial
errors in the distances. Rather, one should calculate the predicted
peculiar velocities given the redshifts to each object, by inverting
the predicted redshift-distance diagram along each line of sight. This
is subject to the ambiguities of triple-valued zones
(Fig. 11). Furthermore, because
the self-consistent
velocity field from the redshift survey predicts the peculiar velocity
of the Local Group, this comparison is best made in the frame in which
the Local Group is at rest. This will give different results from a
comparison in the frame in which the CMB shows no dipole, because the
IRAS velocity field does not exactly match the peculiar velocity of
the Local Group (Section 5.7). Much of
the early work in this
field was done before a proper understanding of selection and
Malmquist biases were at hand
(Section 6.5), making these
results somewhat suspect.
Strauss (1989)
compared the IRAS 1.936 Jy predicted velocity field
with the Mark II peculiar velocity data. A strong correlation between
observed and peculiar velocities was seen, and the slope was
consistent with
= 0.8. Similar results were
found by
minimizing the scatter in the inverse Tully-Fisher relation for the
Aaronson et al. (1982a)
data in a Method II analysis. However, the
error in the derived was not
properly quantified; nor for that
matter was it demonstrated that the scatter was consistent with the
observational errors.
Kaiser et al. (1991)
used a Method I approach to compare the velocity
field from the QDOT redshift survey with the Mark II data. The QDOT
density field (and therefore predicted velocity field) was corrected
for redshift space distortions not by iterations, as in
Section 5.9, but rather by applying a
correction to the smoothed density field at each point taken from
Kaiser (1987)
(cf, Eq. 91). The resulting predicted peculiar velocity field
was compared to the Mark II data, binned on the same grid used to
define the density field; least-squares fits yielded a slope
= 0.86 ± 0.14.
A similar approach was taken by
Hudson (1994b)
who used the density
field of optically selected galaxies to obtain a predicted peculiar
velocity field to compare with the Mark II data. He used the
techniques of
Hudson (1994a)
to correct the data for inhomogeneous
Malmquist bias, assuming the galaxies for which peculiar velocities
were measured to be drawn from the same density distribution as in his
maps. He also included in his models a bulk flow from scales beyond
those surveyed. He concluded from his peculiar velocity scatter plots
that = 0.50 ± 0.06, with
an additional bulk flow of 405 km s-1 towards
l = 292°, b = + 7°. However, this derived
bulk flow is almost in the Galactic plane, in the direction of the
Great Attractor, and thus may be due to overdensities not surveyed by
Hudson's sample. On the other hand, this bulk flow is roughly
consistent with that observed from the Mark III data, so it may indeed
represent flows on scales larger than his sample.
Shaya, Tully, &
Pierce (1992)
also compared peculiar velocities (in this case, from a combination of the
Aaronson et al. (1982a)
data and their own TF data;
Tully, Shaya, &
Pierce 1992)
with a redshift
survey, namely the catalog of galaxies within 3000 km s-1
compiled by
Tully (1987b) .
They used luminosity rather than number weighting, and
carried out an elaborate analysis which includes components to
the density field clustered on a variety of length scales. They
concluded that 0
associated with galaxies is only 0.1, clustered on 1
h-1 Mpc scales. However, their modeling of the effects
of mass concentrations in the Zone of Avoidance, and beyond 3000
km s-1,
is simplistic, and their resulting predicted peculiar velocity field
only bears qualitative resemblance to that measured. A more recent
analysis is presented by
Shaya, Peebles, &
Tully (1994)
,
using
Peebles' (1989)
variational technique to extend the linear theory
relation between the density and velocity fields. They conclude that
optical < 0.4,
but emphasize that their analysis is still in
progress, and awaits improved Tully-Fisher data.
Roth (1993;
1994)
carried out a Tully-Fisher survey in the I band
of 91 galaxies selected from a volume-limited subset of galaxies
within 4000
km s-1 from the 1.936 Jy IRAS redshift survey, and
minimized the scatter of the forward Tully-Fisher relation as a
function of in the
IRAS velocity field model, using a Method
II approach. Extensive Monte-Carlo simulations demonstrated that this
method gives an unbiased estimate of
; he found
~ 0.6. Unfortunately,
systematic errors in the line-width data, and the
dominance of the triple-valued zone around the Virgo cluster (which is
prominent in the sample) mean that the systematic errors associated
with this result are large.
Schlegel (1995)
is extending the survey to
contain ~ 250 galaxies with accurately measured line widths from
H rotation curves, and with
more uniform sky coverage; this
dataset promises to give tighter constraints on
.
rotation curves, and with
more uniform sky coverage; this
dataset promises to give tighter constraints on
.
Finally,
Nusser & Davis
(1994a)
compared the predicted dipole
moment of their multipole expansion of the IRAS velocity and density
field (cf., Eq. 145) with that measured from the
POTENT map. They show that the dipole of a shell as measured in
the Local Group frame depends only on the density field interior to
that shell, making this a semi-local comparison. They conclude
= 0.6 ± 0.2, although
the error was estimated by eye from their
plots. This is a promising way to proceed, especially with their more
sophisticated technique for determining the multipole moments of the
measured velocity field (Section 7.5.4).
Common to the handful of Method II velocity comparisons discussed above is the assumption of a unique redshift-distance mapping, as required in a Method II analysis (Section 6.4.3). In the real world, however, a distance cannot be unambiguously assigned from an observed redshift - even when the peculiar velocity model is "correct." In what follows, we explain why this is so, and describe a maximum likelihood method to overcome the problems that result.
One can distinguish two contributions to a galaxy's peculiar
velocity. The first is what is usually meant by the peculiar velocity
"field." It has a coherence length of a few Mpc or greater, is due
to perturbations in the linear or quasi-linear regime, and is
predictable from an analysis of density fluctuations. The second is
what is loosely referred to as velocity "noise." It has zero
coherence length, arises from strongly nonlinear processes, and is
unpredictable except in a statistical sense. We label the coherent
part v(r), and describe the random part in terms of an rms
radial velocity dispersion
 v. Each can
separately invalidate
the assumption of a unique redshift-distance mapping, as follows:
v. Each can
separately invalidate
the assumption of a unique redshift-distance mapping, as follows:
| (215) |
(cf. Section 6.4.3). There is, however, no guarantee that this equation will have only one solution. When line of sight gradients in v(r) are of order unity, there can be three or more crossing points for given cz. Such regions are generically called "triple-valued zones" (cf., Fig. 11).
 . v(r),
and only defines the
crossing point to accuracy
~ v.
. v(r),
and only defines the
crossing point to accuracy
~ v.
The situations just described are summarized in Fig. 11, which shows a triple-valued zone around the Virgo cluster. The inherent uncertainty due to velocity noise is indicated with the scatter of points.
Because of these effects, Method II is subject to biases over and above selection bias (Section 6.4). Willick et al. (1995d) have developed a modified form of Method II which neutralizes these biases by explicitly allowing for non-uniqueness in the redshift-distance mapping. The basic idea is to derive correct probability distributions of observable quantities, taking into account the complexities of the redshift-distance relation, and then to maximize likelihood over the entire data set. This approach shares features of both Methods I and II (Section 6.4.3), but is closer in spirit to the latter, and will accordingly be called "Method II+" in what follows.
We assume the goal is to fit a model peculiar velocity field v(r; a), where a is a vector of free parameters, and adopt the useful abbreviation

| (216) |
for its radial component. The central element of Method II+ is a description of the redshift-distance relation in terms of a Gaussian probability distribution:

| (217) |
A related probability function is given as a function of r in the
lower half of Fig. 11 (that curve
shows the probability
distribution in Eq. (144), which differs from P(cz| r)
by the additional factors of
n(r)r2
 (4
r2fmin)). Three subtleties of
Eq. (217) deserve mention.
First, v is not
merely the true velocity noise, whose value
is thought to be ~ 150 km s-1 (e.g.,
Groth et al. 1989),
but rather
its convolution with two additional effects: redshift measurement
errors and velocity model errors. The former are small (typically ~
50 km s-1) but not entirely negligible. The latter, which
reflect the
finite accuracy of our predictions, can be estimated from N-body
simulations (e.g.,
Fisher et al. 1994d)
and are of order 200 km s-1.
Second, v is not
necessarily constant; both the true velocity
noise and model errors are larger in dense regions. Third, whereas
true velocity noise is incoherent, model prediction errors are not.
Contributions to v(r) arising on scales too small to be
included in the model, but which unlike true noise have spatial
coherence, manifest themselves as coherent prediction errors. In what
follows, we will neglect these subtleties and treat
v as a
spatial constant of order 200
km s-1 whose value may be held fixed or
treated as a free parameter in the likelihood analysis.
(4
r2fmin)). Three subtleties of
Eq. (217) deserve mention.
First, v is not
merely the true velocity noise, whose value
is thought to be ~ 150 km s-1 (e.g.,
Groth et al. 1989),
but rather
its convolution with two additional effects: redshift measurement
errors and velocity model errors. The former are small (typically ~
50 km s-1) but not entirely negligible. The latter, which
reflect the
finite accuracy of our predictions, can be estimated from N-body
simulations (e.g.,
Fisher et al. 1994d)
and are of order 200 km s-1.
Second, v is not
necessarily constant; both the true velocity
noise and model errors are larger in dense regions. Third, whereas
true velocity noise is incoherent, model prediction errors are not.
Contributions to v(r) arising on scales too small to be
included in the model, but which unlike true noise have spatial
coherence, manifest themselves as coherent prediction errors. In what
follows, we will neglect these subtleties and treat
v as a
spatial constant of order 200
km s-1 whose value may be held fixed or
treated as a free parameter in the likelihood analysis.
We quantified Method II selection bias
(Section 6.5) based on
the probability distribution P(m,
 , r),
arguing that we could in
effect treat redshift as distance. Using Eq. (217), we may
now write down the joint distribution of the TF observables, distance,
and redshift:
, r),
arguing that we could in
effect treat redshift as distance. Using Eq. (217), we may
now write down the joint distribution of the TF observables, distance,
and redshift:

| (218) |
where we have assumed that the TF observables and redshift couple only
via their mutual dependence on true distance. The observables in a
redshift-distance sample are m,
, and
cz. Their distribution is obtained by integration:
| (219) |
Eq. (219) gives the likelihood of a data point in a
redshift-distance sample, valid for arbitrary
v(r;a) and
v. Method
II+ consists of maximizing the product of the
likelihood (Eq. 219) over the peculiar velocity sample,
with respect to the parameters of the velocity field model, the
parameters of the TF relation (including its scatter), and
v.
The overall likelihood depends on TF probability evaluated not only at the crossing point(s), but over a range of distances roughly characterized by

| (220) |
This likelihood will differ from its Method II counterpart to the
extent that the length scale on which
P(m,,
r) varies is
comparable to or smaller than the interval defined by
Eq. (220). The former scale is given by
~  d, where
is the TF fractional
distance error and d = 100.2[m -
M()] is the
inferred distance
(Section 6.5.2). For galaxies beyond
3000 km s-1,
d
d, where
is the TF fractional
distance error and d = 100.2[m -
M()] is the
inferred distance
(Section 6.5.2). For galaxies beyond
3000 km s-1,
d
 600 km
s-1. This is considerably larger than the
range given by Eq. (220) for typical
v, outside triple
valued or flat zones. In these circumstances Methods II and II+
differ little. Indeed, it is easy to see that--again away from
triple-valued or flat zones - Method II+ reduces exactly to
Method II (Eq. 165) in the limit
v -> 0. However,
Method II+ represents a substantial correction to classical
Method II at small (d
600 km
s-1. This is considerably larger than the
range given by Eq. (220) for typical
v, outside triple
valued or flat zones. In these circumstances Methods II and II+
differ little. Indeed, it is easy to see that--again away from
triple-valued or flat zones - Method II+ reduces exactly to
Method II (Eq. 165) in the limit
v -> 0. However,
Method II+ represents a substantial correction to classical
Method II at small (d
 2000 km
s-1) distances, in triple-valued or flat
zones, or when v
becomes anomalously large. Method II+ is
therefore necessary for rigorous analysis of the very local universe
and, in particular, of the Local Supercluster region, where small
distances and triple-valuedness are often combined.
2000 km
s-1) distances, in triple-valued or flat
zones, or when v
becomes anomalously large. Method II+ is
therefore necessary for rigorous analysis of the very local universe
and, in particular, of the Local Supercluster region, where small
distances and triple-valuedness are often combined.
Application of Method II+ requires two additional steps. First,
one must decide whether to use the forward or inverse form of the TF
relation, and thus whether Eq. (171) or
Eq. (188) is used for
P(m,,
r) in
Eq. (219). As in Method II (Section 6.4),
the
inverse method is advantageous when sample selection is independent of
velocity width (35) ,
though with Method II+ this
choice introduces a new uncertainty discussed below. Second, one does
not apply Eq. (219) directly, but instead derives from it
suitable conditional probabilities:
P(m|,
cz) in the forward case,
P( |
m, cz) in the inverse. These are obtained from
Eq. (219) as follows:
| (221) |
and
| (222) |
where we have restored the compact notation P(cz| r)
(Eq. 217), reversed the order of integration in the
denominators, and allowed for an explicit r-dependence of sample
selection (which in fact exists for some of the Mark III samples;
cf. Section 6.5.3). The integrals over
m and in the
denominators of Eqs. (221) and (222) can
be done analytically for simple forms of S
(Willick 1994),
so two-dimensional integrations are not required. The chief advantage of
conditional probabilities is that they are less sensitive than
P(m,,
cz) to the precision with which the number density
n(r)
is modeled. As n(r) appears in both numerator and
denominator, it
only weakly affects the conditional distributions provided it varies
slowly compared with P(cz| r) or the TF probability
term, as will
generally be the case. This is important, since it is the accuracy of
our velocity model, not our density model, with which we are mainly
concerned. Still, Method II+ (unlike Method II) does require a
density model, and in that sense resembles a Method I analysis.
Finally, note that the velocity width distribution function
 ()
(Section 6.5) strictly cancels out of
P(m|,
cz), while the luminosity function
(M)
(Section 6.5.4) does not cancel out of
P( |
m, cz) (although
the results are insensitive to the luminosity function, as it again
appears in numerator and denominator).
()
(Section 6.5) strictly cancels out of
P(m|,
cz), while the luminosity function
(M)
(Section 6.5.4) does not cancel out of
P( |
m, cz) (although
the results are insensitive to the luminosity function, as it again
appears in numerator and denominator).
Willick et al. (1995d)
used Method II+ to analyze data from the
Mark III peculiar velocity catalog
(Section 7.2). They
limited their analysis to the 900 galaxies in the TF samples of
Mathewson et
al. (1992b)
and Aaronson et
al. (1982b)
,
which densely
sample the local region, and to redshifts
 3500 km
s-1. The
forward method (Eq. 221) was used, and the TF parameters
for each sample (slope, zeropoint, and scatter) were allowed to vary
in the search for maximum likelihood, rather than fixing them at their
values determined in the Mark III analysis
(Section 7.2).
3500 km
s-1. The
forward method (Eq. 221) was used, and the TF parameters
for each sample (slope, zeropoint, and scatter) were allowed to vary
in the search for maximum likelihood, rather than fixing them at their
values determined in the Mark III analysis
(Section 7.2).
The IRAS 1.2 Jy predicted peculiar velocity field was taken as the
model to be fitted to the data. To first order this model velocity
field depends only on ,
although the analysis was carried out
for two different smoothing lengths, and with and without nonlinear
effects included. Using the IRAS galaxy density field for the
quantity n(r) that appears in Eqs. (221)
and (222) assumes that IRAS galaxies are distributed
like the Mark III sample objects. This assumption may not be correct
in detail but is expected to have a minimal effect on our conditional
analysis. The forward Method II+ analysis was carried out in
terms of a quantity  defined by
defined by
| (223) |
where the sum runs over all galaxies used in the comparison. An analogous statistic using the inverse relation is discussed by Willick et al. and gives consistent results.
|
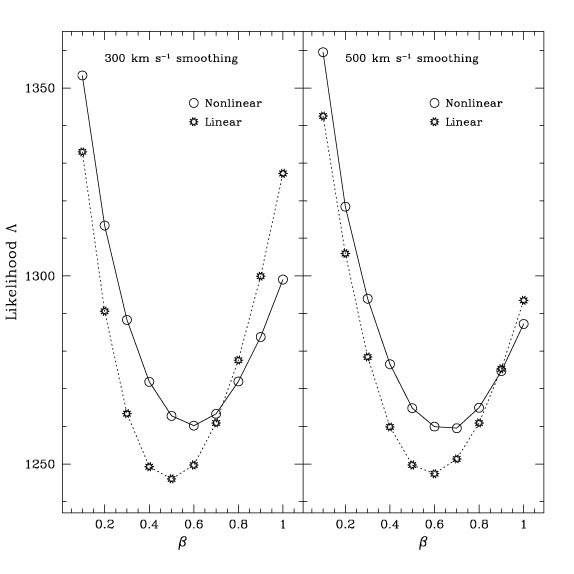
Figure 18. Likelihood
|
We summarize these results in Fig. 18, which shows
vs.
curves for four realizations
of the IRAS fields: 300 and 500
km s-1 gaussian smoothing lengths, each with and
without nonlinear corrections, following
Nusser et al. (1991)
,
and setting b = 1. The "best" values of
occur at the minima
of the curves; they range from
 0.48 for 300 km
s-1 smoothing linear to
0.65 for 500
km s-1 smoothing
nonlinear. The statistical error at 95% confidence level
associated with these numbers is ~ 0.15, as determined by
deviations of the likelihood function from its minimum. Note that
there are systematic effects acting as well: a larger smoothing length
leads to a larger , and
nonlinear corrections yield larger
for a given smoothing
length. These results are to be
expected: both increasing the smoothing scale and making nonlinear
corrections decrease the amplitude of predicted peculiar
velocities, and thus are qualitatively similar to decreasing
.
For the nonlinear fields, the predicted velocities now depend
separately on 0
and b; the curves here were obtained for
the case b = 1, i.e.,
=
00.6.
0.48 for 300 km
s-1 smoothing linear to
0.65 for 500
km s-1 smoothing
nonlinear. The statistical error at 95% confidence level
associated with these numbers is ~ 0.15, as determined by
deviations of the likelihood function from its minimum. Note that
there are systematic effects acting as well: a larger smoothing length
leads to a larger , and
nonlinear corrections yield larger
for a given smoothing
length. These results are to be
expected: both increasing the smoothing scale and making nonlinear
corrections decrease the amplitude of predicted peculiar
velocities, and thus are qualitatively similar to decreasing
.
For the nonlinear fields, the predicted velocities now depend
separately on 0
and b; the curves here were obtained for
the case b = 1, i.e.,
=
00.6.
Which of the four IRAS predicted velocity fields shown should
ideally be used in estimating ?
In Method II+ we are
comparing the predicted velocity field with unsmoothed data. The field
obtained from 300 km s-1 smoothing thus gives rise to the
most valid
comparison here. At smaller smoothing lengths the nonlinear
corrections cease to be valid. Nonlinear effects must be present, as
the overdensities at 300 km s-1 smoothing can be considerably
in excess of unity. However, Fig. 18 shows
that the nonlinear
curve has formally smaller likelihood than the linear curve. The
reason for this is not well understood at present. A compromise value
is
0.55, roughly midway
between the linear and nonlinear
minima. It is not clear how to combine the systematic and statistical
errors we have identified; for now we conservatively put the 95%
confidence level at ± 0.25.
As mentioned above the value of the rms velocity noise
v was
treated as a free parameter, its final value determined by maximizing
likelihood for each .
Willick et al. found that
v
150-160
km s-1 for the likelihood-maximizing values of
. This value is remarkably
small, in view of the fact that the
IRAS predictions themselves are thought to have rms errors of
100-200 km s-1, as discussed above; the implication would
appear to be that the true noise is
100 km
s-1. It is unlikely that the
velocity field is in reality that cold. It is likely instead that by
neglecting correlated model prediction errors (see above), the
likelihood analysis ends up underestimating
v. Future
implementations of both Method II+ (and Method II, which
similarly assumes uncorrelated residuals) will need to address this issue.
8.2. Comparison via the Density Field
The reconstruction of the mass density field using the POTENT method
begs a comparison with the galaxy density field as observed in
redshift surveys. Indeed, to the extent that the two fields are
proportional to one another, their ratio gives a measure of
via Eq. (149).
Dekel et al. (1993)
carried out this
comparison, using the Mark II POTENT maps of
Bertschinger et
al. (1990)
and the IRAS 1.936 Jy redshift survey. The first, and most
striking result from this comparison, is that the POTENT and IRAS
density field show qualitative agreement. Given the noise and
sparseness in the peculiar velocity data, the POTENT map has much
greater noise than does the IRAS map, and therefore the region in
which the comparison of the two can be made is limited. Nevertheless,
both show the Great Attractor and the void in front of the
Perseus-Pisces supercluster. With 1200 km s-1 Gaussian
smoothing, there
are ~ 10 independent volumes within which the comparison of the
two density fields can be made. A scatter plot of the two shows a
strong correlation. In the absence of biases, the slope of the
regression would be an estimate of
. However, as discussed in
Section 7.5, the POTENT density field is
subject to a number
of biases. The most severe of these in this context is Sampling
Gradient bias, with inhomogeneous Malmquist bias taking a close
second. One can quantify the first by sampling the IRAS predicted
velocity field at the positions of the Mark II galaxies, and running
the results through the POTENT machinery; comparing the resulting
density field to the input density field yields a regression slope of
0.65, substantially different from unity. Given this fact, Dekel
et al. used an elaborate maximum likelihood technique to quantify the
agreement between the POTENT and IRAS density fields. For a given
value of (actually given
values of 0 and
b; Eq. (209) rather than Eq. (149) is used
throughout), they create mock Mark II datasets given the IRAS
predicted peculiar velocity field (via the method described in
Section 5.9), noise is added, and the
results are fed into
POTENT. Note that these simulations suffer from sampling gradient bias
exactly as does the real POTENT data. The slope and scatter of the
regression between the original IRAS map and the mock POTENT map are
recorded, and the two-dimensional distribution of these two quantities
is calculated for 100 such realizations. Elliptical fits to this
distribution allows them to calculate the probability that the
observed slope and scatter of the regression is consistent with the
model assumed (i.e., the IRAS predicted peculiar velocity field for
the given values of
0 and b
are consistent with the observed
peculiar velocity field, given the errors). This process is then
repeated for a grid of values of
0 and b.
The conclusions from this work are as follows:
0 and b
for which the likelihood
that the model is is consistent with the data is high. That is, the
observed scatter is consistent with the assumed errors and the
assumption that IRAS galaxies are at least a biased tracer of the
density field that gives rise to the observed peculiar velocities.
, for which the likelihood
curve gives
=
1.28-0.59+0.75 at 95% confidence.
0 and b
separately
are quite a bit weaker. Indeed, the likelihood contour levels do not
close at large 0
for a given , meaning that the
data are
consistent with purely linear theory in which no second-order effects
exist. The data are inconsistent with highly non-linear
conditions (i.e., very small
0 for a given
), but this
is the regime in which the non-linear approximation used starts to
break down anyway.
May we then conclude that the gravitational instability picture has
been proven? After all, we have seen consistency in the data with one
of its strongest predictions, namely Eq. (30). However, as
Babul et al. (1994)
emphasize, Eq. (30) can be
derived directly from the first of Eqs. (21), the
continuity equation alone; only the constant of proportionality comes
from gravity. Indeed,  and
and
 . v
are proportional for any model in which galaxies are a linearly biased
tracer of the mass, and for which the time-averaged acceleration is
proportional to the final acceleration. They show analytically and
with the aid of simulations that a range of models with
non-gravitational forces exhibit correlations between
and
. v at least
as strong as that seen in the POTENT-IRAS comparison. Thus a
proof of the gravitational instability picture will
require ruling out these alternative models by other means.
. v
are proportional for any model in which galaxies are a linearly biased
tracer of the mass, and for which the time-averaged acceleration is
proportional to the final acceleration. They show analytically and
with the aid of simulations that a range of models with
non-gravitational forces exhibit correlations between
and
. v at least
as strong as that seen in the POTENT-IRAS comparison. Thus a
proof of the gravitational instability picture will
require ruling out these alternative models by other means.
Work is in progress as this review is being written, to update the
POTENT results using the Mark III peculiar velocity compilation. The
Mark III data have been corrected for inhomogeneous
Malmquist bias, assuming that the IRAS density field is that of the
galaxies of the Mark III sample. More importantly, however, the
systematic errors in the overlap between datasets have been minimized,
and the volume surveyed well with the Mark III data is such that the
IRAS-POTENT comparison can be done over four times as many data
points as before. In addition, the more complete sampling means that
the sampling gradient bias is smaller than with the Mark II data, by
roughly a factor of two in the mean. The left-hand panel of
Fig. 19 shows a preliminary version of the POTENT
density field in the Supergalactic plane using 1200
km s-1 Gaussian
smoothing, taken from Fig. 17. The
right
hand panel shows the density field of the IRAS 1.2 Jy survey at the
same smoothing. The qualitative agreement is remarkable. In the
Supergalactic plane, both maps show the Great Attractor, the
Perseus-Pisces Supercluster, the Coma-A1367 Supercluster, as well as
voids between Coma and Perseus, and South of the Great Attractor (the
Sculptor Void). Work is ongoing to quantify the differences between
the two maps, and to put exact error bars on the derived
.
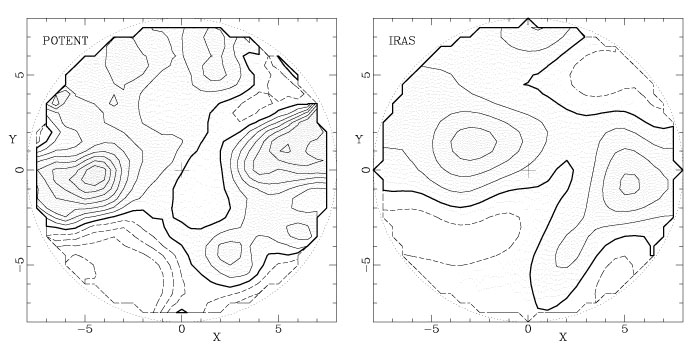
|
Figure 19. The left panel is
the POTENT density field
|
Hudson et al. (1995)
have carried out a comparison of the Mark III
POTENT results with the optical galaxy density field of
Hudson (1993a,
b).
They also find good agreement. between the two density
fields; a less elaborate analysis than that of
Dekel et al. (1993)
shows = 0.74 ± 0.13.
35 In principle, Method II+ rigorously incorporates selection effects into either the forward or inverse formalism. However, with real data characterization of sample selection is often subject to uncertainty (Willick et al. 1995a b). Its relatively smaller susceptibility to selection bias thus remains a virtue of the inverse approach. Back.