


B.10.2. Numerical Models of Extended Lensed Sources
Obviously the ring curve and its extrema are an abstraction of the real
structure of the lensed source. Complete modeling of extended sources
requires a real model for the surface brightness of the source. In
many cases it is sufficient to simply use a parameterized model for the
source, but in other cases it is not. The basic idea in any non-parametric
method is that there is an optimal estimate of the source structure for
any given lens model. This is most easily seen if we ignore the smearing
of the image by the beam (PSF) and assume that our image is a surface
brightness map. Since surface brightness is conserved by lensing,
fI( ) =
fS(
) =
fS( ). For any lens model with
parameters p, the lens equations define the source position
(,
p) associated with each image position.
If we had only single images of each source point, this would be useless
for modeling lenses. However, in a multiply imaged region, more than
one point on the image plane is mapped to the same point on the source
plane. In a correct lens model, all image plane points mapped to the
same source plane position should have the same surface brightness, while
in an incorrect model, points with differing surface brightnesses will be
mapped to the same source point. This provided the basis for the first
non-parametric method, sometimes known as the "Ring Cycle" method
(Kochanek et al.
[1989],
Wallington, Kochanek & Koo
[1995]).
Suppose source plane pixel j is associated with image plane pixels
i = 1 ... nj with surface brightness
fi and uncertainties
). For any lens model with
parameters p, the lens equations define the source position
(,
p) associated with each image position.
If we had only single images of each source point, this would be useless
for modeling lenses. However, in a multiply imaged region, more than
one point on the image plane is mapped to the same point on the source
plane. In a correct lens model, all image plane points mapped to the
same source plane position should have the same surface brightness, while
in an incorrect model, points with differing surface brightnesses will be
mapped to the same source point. This provided the basis for the first
non-parametric method, sometimes known as the "Ring Cycle" method
(Kochanek et al.
[1989],
Wallington, Kochanek & Koo
[1995]).
Suppose source plane pixel j is associated with image plane pixels
i = 1 ... nj with surface brightness
fi and uncertainties
 i.
The goodness of fit for this source pixel is
i.
The goodness of fit for this source pixel is
 |
(B.142) |
where fs will be our estimate of the surface
brightness on the source plane. For each lens model we compute
 2(p)
=
2(p)
=  2j
and then optimize the lens parameters to minimize the surface brightness
mismatches.
2j
and then optimize the lens parameters to minimize the surface brightness
mismatches.
The problem with this algorithm is that we never have images that are true surface brightness maps - they are always the surface brightness map convolved with some beam (PSF). We can generalize the simple algorithm into a set of linear equations. Although the source and lens plane are two-dimensional, the description is simplified if we simply treat them as a vector fS of source plane surface brightness and a vector fI of image plane flux densities (i.e. including any convolution with the beam). The two images are related by a linear operator A(p) that depends on the parameters of the current lens model and the PSF. In the absence of a lens, A is simply the real-space (PSF) convolution operator. In either case, the fit statistic
 |
(B.143) |
(with uniform uncertainties here, but this is easily generalized) must
first be solved to determine the optimal source structure for a given
lens model and then minimized as a function of the lens model. The
optimal source structure
d2 /
d fS = 0 leads to the equation that
fS = A-1(p)
fI. The problem, which is
the same as we discussed for non-parametric mass models in
Section B.4.7, is that a
sufficiently general source model when combined with a PSF will lead
to a singular matrix for which A(p)-1 is
ill-defined - physically, there will be wildly oscillating source models
for which it is possible to obtain
2(p)
= 0.
Three approaches have been used to solve the problem. The first is
LensClean (Kochanek & Narayan
[1992],
Ellithorpe, Kochanek & Hewitt
[1996],
Wucknitz
[2004]),
which is based on the Clean algorithm of radio
astronomy. Like the normal Clean algorithm, LensClean is a non-linear
method using a prior that radio sources can be decomposed into point
sources for determining the structure of the source. The second
is LensMEM (Wallington, Kochanek & Narayan
[1996]),
which is based on the Maximum Entropy Method
(MEM) for image processing. The determination of the source structure
is stabilized by minimizing
2 +

 d2
d2
 fS ln(fS / f0)
while adjusting the Lagrange multiplier
such that at the
minimum
2 ~
Ndof where Ndof is the number of
degrees of freedom in the model. Like Clean/LensClean, MEM/LensMEM is a
non-linear algorithm in which solutions must be solved iteratively.
Both LensClean and LensMEM can be designed to produce only positive-definite
sources. The third approach is linear regularization where the source
structure is stabilized by minimizing
2 +
fS . H .
fS
(Warren & Dye
[2003],
Koopmans et al.
[2003]).
The simplest choice for the matrix H is the identity matrix, in which
case the added criterion is to minimize the sum of the squares of the source
flux. More complicated choices for H will minimize the gradients or
curvature of the source flux. The advantage of this scheme is that the
solution is simply a linear algebra problem with
(AT(p) A(p) +
H)
fS = AT(p)
fI.
fS ln(fS / f0)
while adjusting the Lagrange multiplier
such that at the
minimum
2 ~
Ndof where Ndof is the number of
degrees of freedom in the model. Like Clean/LensClean, MEM/LensMEM is a
non-linear algorithm in which solutions must be solved iteratively.
Both LensClean and LensMEM can be designed to produce only positive-definite
sources. The third approach is linear regularization where the source
structure is stabilized by minimizing
2 +
fS . H .
fS
(Warren & Dye
[2003],
Koopmans et al.
[2003]).
The simplest choice for the matrix H is the identity matrix, in which
case the added criterion is to minimize the sum of the squares of the source
flux. More complicated choices for H will minimize the gradients or
curvature of the source flux. The advantage of this scheme is that the
solution is simply a linear algebra problem with
(AT(p) A(p) +
H)
fS = AT(p)
fI.
In all three of these methods there are two basic systematic issues
which need to be addressed. First, all the methods have some sort
of adjustable parameter - the Lagrange multiplier
in LensMEM
or the linear regularization methods and the stopping criterion in the
LensClean method. As the lens model changes, the estimates of the
parameter errors will be biased if the treatment of the multiplier
or the stopping criterion varies with changes in the lens model in some
poorly understood manner. Second, it is difficult to work out the
accounting for the number of degrees of freedom associated with the
model for the source when determining the significance of differences
between lens models. Both of these problems are particularly
severe when comparing models where the size of the multiply imaged
region depends on the lens model. Since only multiply imaged regions
supply any constraints on the model, one way to improve the goodness of
fit is simply to shrink the multiply imaged region so that there are
fewer constraints. Since changes in the radial mass distribution have
the biggest effect on the multiply imaged region, this makes estimates
of the radial mass distribution particularly sensitive to controlling
these biases. It is fair to say that all these algorithms lack a
completely satisfactory understanding of this problem. For radio
data there are added complications arising from the nature of
interferometric observations, which mean that good statistical models
must work with the raw visibility data rather than the final images (see
Ellithorpe et al.
[1996]).
These methods, including the effects of the PSF, have been applied to
determining the mass distributions in 0047-2808 (Dye & Warren
[2003]),
B0218+357 (Wucknitz, Biggs & Browne
[2004]),
MG1131+0456 (Chen, Kochanek & Hewitt
[1995],
and MG1654+134 (Kochanek
[1995a]).
We illustrate them with the Dye & Warren
([2003])
results for 0047-2808 in Fig. B.72.
The mass distribution consists of the lens galaxy and a cuspy dark
matter halo, where Fig. B.72 shows the final
constraints on the mass-to-light ratio of the stars in the lens galaxy
and the exponent of the central dark matter density cusp
(
 r-
r- ). The allowed parameter
region closely resembles earlier results using either statistical
constraints
(Fig. B.32) or stellar dynamics
(Fig. B.33). In fact,
the results using the stellar dynamical constraint from Koopmans & Treu
([2003])
are superposed on the constraints from the
host in Fig. B.72, with the host providing a
tighter constraint on the mass distribution than the central velocity
dispersion. The one problem
with all these models is that they have too few degrees of freedom in their
mass distributions by the standards we discussed in
Section B.4.6. In
particular, we know that four-image lenses require both an elliptical lens
and an external tidal shear in order to obtain a good fit to the data
(e.g. Keeton, Kochanek & Seljak
[1997]),
while none of these
models for the extended sources allows for multiple sources of the angular
structure in the potential. In fact, the lack of an external shear probably
drives the need for dark matter in the 0047-2808 models. Without dark
matter, the decay of the stellar quadrupole and the low surface density
at the Einstein ring means that the models generate too small a
quadrupole moment to fit the data in the absence of a halo.
The dark matter solves the problem both through its own ellipticity and
the reduction in the necessary shear with a higher surface density near the
ring (recall that
1 -
<
). The allowed parameter
region closely resembles earlier results using either statistical
constraints
(Fig. B.32) or stellar dynamics
(Fig. B.33). In fact,
the results using the stellar dynamical constraint from Koopmans & Treu
([2003])
are superposed on the constraints from the
host in Fig. B.72, with the host providing a
tighter constraint on the mass distribution than the central velocity
dispersion. The one problem
with all these models is that they have too few degrees of freedom in their
mass distributions by the standards we discussed in
Section B.4.6. In
particular, we know that four-image lenses require both an elliptical lens
and an external tidal shear in order to obtain a good fit to the data
(e.g. Keeton, Kochanek & Seljak
[1997]),
while none of these
models for the extended sources allows for multiple sources of the angular
structure in the potential. In fact, the lack of an external shear probably
drives the need for dark matter in the 0047-2808 models. Without dark
matter, the decay of the stellar quadrupole and the low surface density
at the Einstein ring means that the models generate too small a
quadrupole moment to fit the data in the absence of a halo.
The dark matter solves the problem both through its own ellipticity and
the reduction in the necessary shear with a higher surface density near the
ring (recall that
1 -
< >).
Again see the need for a greater focus on the angular structure of the
potential.
>).
Again see the need for a greater focus on the angular structure of the
potential.
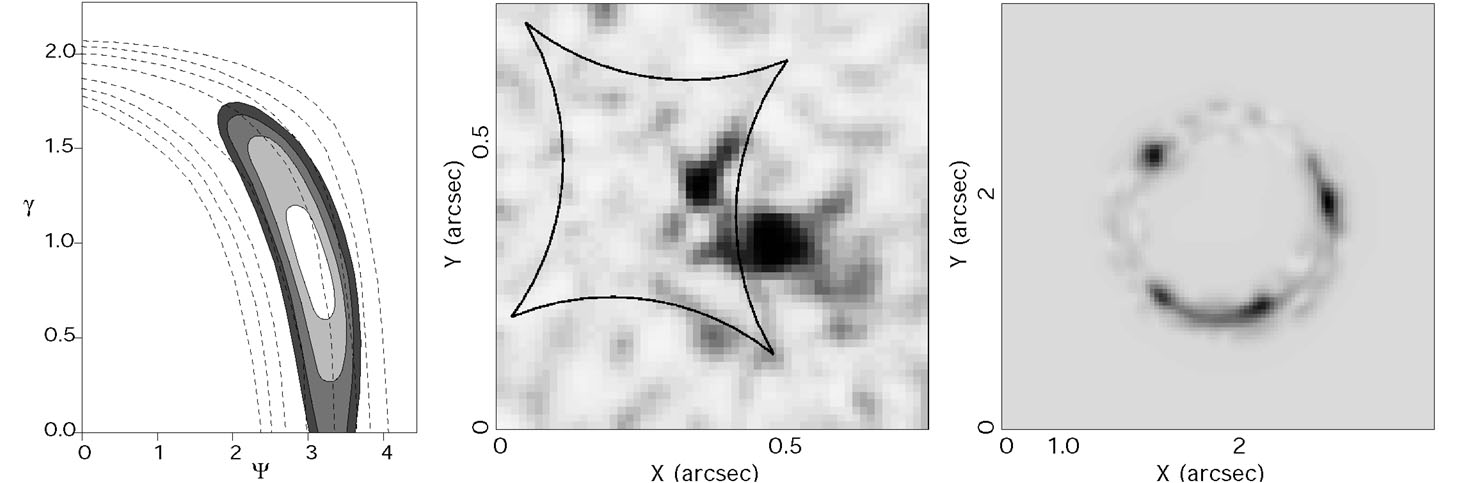 |
Figure B.72. Models of 0047-2808 from Dye & Warren
([2003]).
The right panel shows the lensed image of
the quasar host galaxy after the foreground lens has been subtracted.
The middle panel shows the reconstructed source and its position relative
to the tangential (astroid) caustic. The left panel shows the resulting
constraints on the central exponent of the dark matter halo
( |